
Research
A Highly Maneuverable Hybrid Energy-Efficient Rolling/Flying System
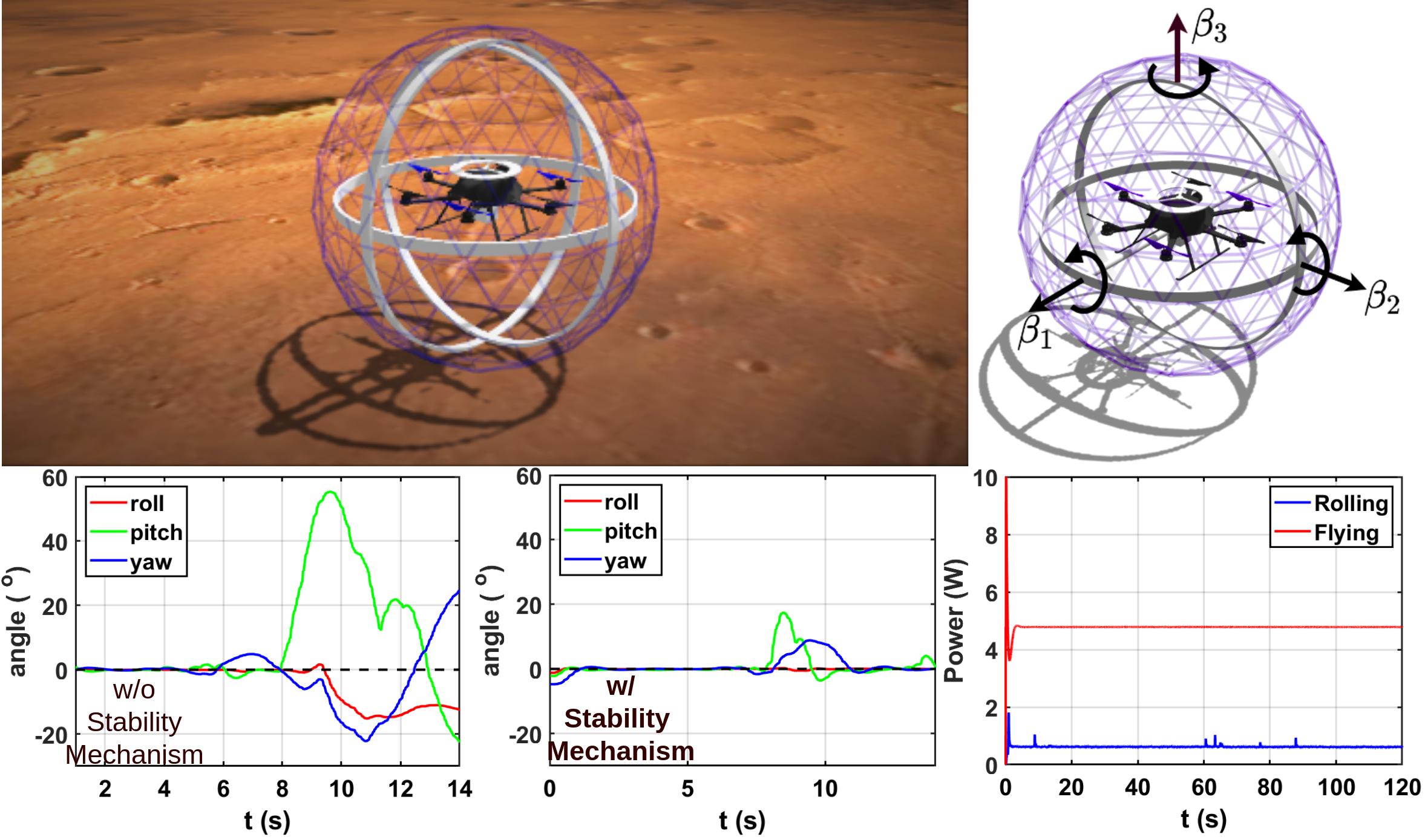
Abstract: — Spherical robots are typically comprised of an actuation unit enclosed by a spherical shell. Among nonholonomic systems, spherical robots offer the best maneuverability and lowest energy consumption (due to their omnidirectional movement and single contact point with the ground). This allows them to traverse rough and uneven terrains. Further, using their ability to roll on the ground, they can provide a significantly higher operating time compared to aerial-only robots. Unfortunately, these robots are under-emphasized by researchers compared to other robots (i.e., legged or wheeled robots). Additionally, despite their potential to be used in a multitude of real-world applications, spherical robots have not been successfully adopted by the industry. This is due to the lack of controllability and traversability of the developed designs. In this paper, we introduce a hybrid rolling/flying robot. This design benefits from a flywheel to reduce the effects of the terrain (shocks and vibrations) on the camera and sensors. Our design allows the application of existing control algorithms of drones (such as PX4) on a rolling system. In addition, we propose a dynamics model that can use the point cloud representation of the terrain to simulate the motion of the system with applications in real-time modeling and control.
Perception-Aware local planning for MAV with Gaussian Mixture Modeling on Keypoints
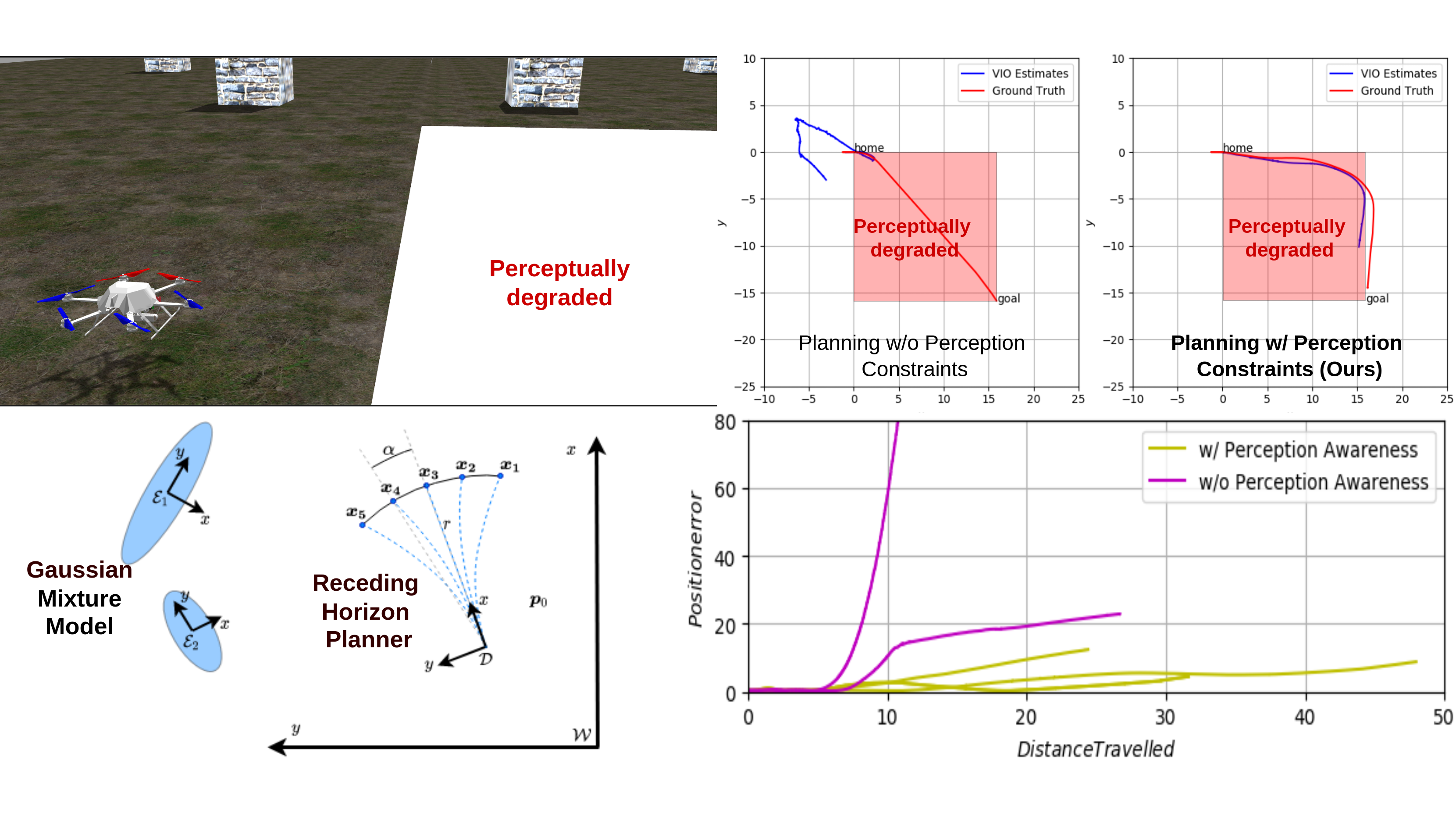
Abstract: Aerial robots have seen a boom in the past decade both in industry and academia, they are used to solve challenging tasks such as search and rescue, reconnaissance, medical delivery. This is mainly due to their agile behavior, easy control, high modularity, and capability to fly to hard-to-reach areas. Such flying robots have great potential to operate in GPS denied environments such as cluttered indoor areas, and disaster-struck scenes, and unstructured environments. Common approaches to enable flight in such environments implement visual SLAM and Occupancy grid-based planners. However, these approaches fail to navigate in perceptually degraded environments with reflective surfaces, fire, water, ill-lit or completely dark environments. Moreover, these environments often lack texture which a camera can perceive to estimate its position. To ensure accurate position estimates, there is a need to plan the aerial robot paths to maximize the visual information in the camera field. We propose a receding horizon-based planning approach that evaluates the visual information using GMM (Gaussian Mixture Modelling) clustering of the point cloud from VIO to evaluate candidate trajectories that maximized the visual information. We discuss the results with enhanced performance of the VIO method by following the paths generated by the proposed perception-aware planner compared to a purely reactive planner.
Multi-modal robotic system for mid-air docking and ground rolling
Abstract: Considerable work has been done in the field of multi-modal robots, but a handful of these systems exploit the multi-agent domain of robotics. This work presents a novel solution for multi-modal multi-agent decentralized system using micro quadrotor aerial robots having the ability to make temporary modular structures for either aerial or ground traversal. The proposed solution can navigate in an environment by flying individually or as a structure and transforming the structure into a wheel cage for ground transversal. In our system, each robot uses visual servoing to approach and dock to a companion drone. Each robot is equipped with a visual-inertial odometry system, thus eliminating the need for any external positioning system, this empowers the solution to be deployed in both indoor and outdoor environments. The work was concluded with successful testing and experimental validation on a couple of robots performing docking, morphing and ground rolling. We also explain the decentralized state-machine, searching, docking process, morphing, ground traversal and the dynamics/control of the system after docking. Extension of this solution can facilitate the development of multi-modal multi-agent systems for the exploration of challenging terrains and subterranean of planet earth and beyond.
Box Wing: Aerodynamic experimental study for applications in MAVs
Abstract: Advancements in the field of aerial robotics and micro aerial vehicles (MAVs) have increased the demand for high payload capabilities. Closed wing designs like the annular wing, the joined wing, the box wing and spiroid tip devices improve the aerodynamic performance by suppressing the wingtip vortices along with an enhanced lift coefficient. A box wing may be defined as a wing that effectively has two main planes which merge at their ends so that there are no conventional wingtips. We propose the implementation of box wings as the main lifting surface for such systems. Box wings have a potential of generating lift with considerably less induced drag and delayed stall angles than monoplane wings. We study the aerodynamic aspects of a box wing model using wind tunnel tests and numerical simulations. We conducted Computational Fluid Dynamics (CFD) simulation subjecting the model to a steady flow and later analysed the vortex core using CFD tools. Wind tunnel measurements of the forces were obtained using sting balance. Furthermore, polyester thread tufts and smoke flow visualisation were performed to understand the qualitative behaviour of the scaled model in the open to atmosphere, suction type tunnel. Our results reveal an increase in the lift to drag (L/D) ratio of the wing by 25% and a delay in the model’s stall angle by+ 6 compared to a monoplane; implying a lower stalling speed for mini unmanned aerial vehicles (UAVs) and MAVs. These advancements if applied could revolutionize the capabilities of intelligent flying systems by enabling them to carry better sensors, computational units and other payloads as per the mission.
Archived Projects
Motion planning in warehouse
My solution used semi dense depth map to segment the shelf in the warehouse and localize itself with respect to the former. Along with the depth map it also made the use of text bounding rectangles and homography based localisation using planar objects (rectangles). The algorithm was equiped with fallback to avoid loss of rectangles. The final solution involes Teseract OCR, OpenCv and DJItelloPy SDK.
Window escaping aerial robot
This solution for window escaping involves a saturation sensitive edege detector to detect the annulus of the window frame. The algorithm used the edges of window to align and approach the window inorder to escape. Such an algorithm is of very high importance in areas of urban reconnaissance and can be extended to rapid escape in threatening situations. This application is majorly based on OpenCv and PID based control logics.
Implementation of Pushbroom Stereo for UAV
I worked on this algorithm while learning about cameras, particularly a stereo camera. I got to understsand about disparity, depth-map, blockmatching and geometry of pinhole camera model. I also got deep insight on the epipolar geometry. My implementation used FAST features along with Lucas Kanade Tracker to track the points.
Ground robot tapping and perching by an aerial robot
This algorithm was developed to solve the task of ground robot tapping in IARC Mission 7, this also solves the problem of landing on a moving platform. The robot makes the approach in a way that the horizontal velocity is negligible, to avoid toppling of the aerial robot. The solution was tested in simulated enviornment in Gazebo, it was written in C++, and made use of mavros.
Handmade Radio Controlled Aircraft
Along with aerial robotics I have a huge interest in rc planes and love to fly them in my leisure time. I made this aircraft after my school ended in the year 2017. It was a self fabricated aircraft made of wood and styrofoam. It comprises of all the essesntial control surfaces (Aeileron, Elevator, Rudder) and was made stall resistant using vortex generators on the wings of the aircraft.
Skills and Interests
Over the years while working on my projects I have gained these skills and had experience with the following
-
Computer Vision
-
Aerial Robotics
-
Aeromodelling
-
Computer Simulations
-
Aerial Photography
-
Anything which gets airborne
Here are some cool aerial shots of my college.
Contact Me
Want to stay in touch? you can contact me here and we might discuss a great idea together.
© 2018 Conjoint. All rights reserved | Design by W3layouts.